
- Kabel gebruikt
- Verificatie-instructies
- Oscillografie van K-CAN, PT-CAN, F-CAN
- Order voor weerstandsmeting met bijpassende weerstand K-CAN, PT-CAN en F-CAN
- K-CAN
- PT-CAN, F-CAN
- Let op!
- CAN-bus werkt niet
Deze handleiding wordt gebruikt om te controleren of het hoge niveausignaal van de CAN en het lage niveau van het CAN-signaal correct naar de busverbinding worden verzonden.
Kabel gebruikt
Multifunctionele kabel
Verificatie-instructies
- Spanningstest (oscilloscoop): om de spanning te controleren, moet de batterij zijn aangesloten en moet het contact zijn ingeschakeld.
- Weerstandsmeting: Bij het meten van weerstand is het noodzakelijk dat het te meten object spanningsloos wordt gemaakt vóór de meting. Om dit te doen, is de batterij losgekoppeld. Wacht 3 minuten totdat alle condensatoren in het systeem zijn ontladen.
CAN informatie
De CAN-bus (Controller Area Network) is een serieel bussysteem met de volgende kenmerken:
- signaalvoortplanting vindt in beide richtingen plaats.
- Elk bericht wordt ontvangen door alle busabonnees. Elke bus-abonnee beslist of hij het bericht gebruikt,
- Extra bus-abonnees worden toegevoegd door een eenvoudige parallelle verbinding.
- Het bussysteem vormt een systeem met een bestuurder. Elke busdeelnemer kan een bestuurder of een actuator zijn, afhankelijk van of deze is aangesloten als zender of ontvanger.
- Een tweedraadsverbinding wordt gebruikt als transmissiemedium. Draadbenamingen: CAN low en CAN high.
- In de regel kan elke bus-abonnee via bus met alle andere bus-abonnees communiceren. Gegevensuitwisseling op de bus is onderworpen aan de toegangsregels. Het belangrijkste verschil tussen de K-CAN-gegevensbus (carrosseriekanbus), PT-CAN-bus (motor- en transmissie-CAN-bus) en de F-CAN-bus (chassis-CAN-bus) is:
- K-CAN: gegevensoverdrachtssnelheid ca. 100 Kbps Enkele draad mogelijk.
- PT-CAN: gegevensoverdrachtssnelheid ca. 500 Kbps Modus met één draad is niet mogelijk.
- F-CAN: gegevensoverdrachtssnelheid ca. 500 Kbps Modus met één draad is niet mogelijk.
Bestuurder: de bestuurder is een actieve communicatiepartner waar het communicatie-initiatief vandaan komt. De bestuurder heeft voorrang en regelt de communicatie. Het kan via het bussysteem berichten naar de passieve busdeelnemer (actuator) sturen en, op verzoek, zijn berichten ontvangen.
Actuator: de actuator is een passief communicatie-lid. Het ontvangt een opdracht om gegevens te ontvangen en te verzenden.
Systeem met master-apparaat: in een systeem met een master-apparaat kunnen communicatie-deelnemers op een bepaald moment de rol van master of actuator op zich nemen.
Oscillografie van K-CAN, PT-CAN, F-CAN
Voor meer duidelijkheid, of de CAN-bus probleemloos werkt, moet u de buscommunicatie bekijken. Tegelijkertijd is het niet nodig om afzonderlijke bits te analyseren en moet u er alleen voor zorgen dat de CAN-bus werkt. Oscillografie laat zien: "De CAN-bus werkt duidelijk zonder storingen".
Bij het meten met een spanningsoscilloscoop ontvangen een CAN (of hoge CAN-High) laag-niveau draad en aarde een blokgolfsignaal binnen het spanningsbereik:
K-CAN:
Laag CAN-niveau ten opzichte van massa: U min = 1 V en U max = 5 V
Hoog CAN-niveau ten opzichte van massa: U min = 0 V en U max = 4 V
Deze waarden zijn bij benadering en kunnen, afhankelijk van de busbelasting, tot 100 mV variëren.
Oscilloscoop-instellingen voor metingen op de K-CAN:
CH1: Probe 1, Rank 2 B / div; DC DC2-aansluiting: Probe 2, Grade 2 V / div; DC-verbindingstijd: 50 ms / div
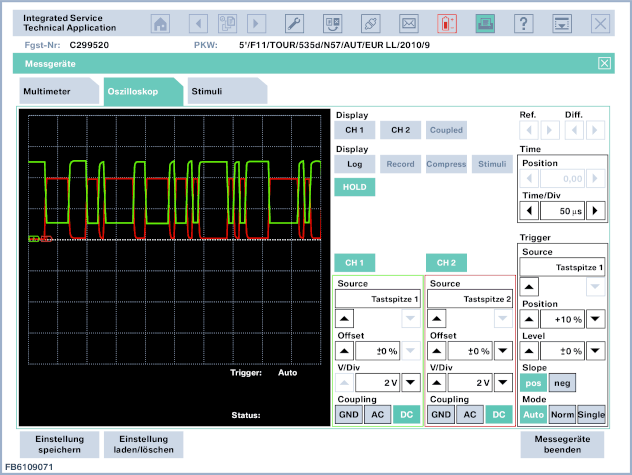
Fig. 1: K-CAN-meting: CH1 laag CAN-niveau, CH2 hoog CAN-niveau
Bij het meten met een spanningsoscilloscoop ontvangen een CAN (of hoge CAN-High) laag-niveau draad en aarde een blokgolfsignaal binnen het spanningsbereik:
PT-CAN en F-CAN
Laag CAN-niveau ten opzichte van massa: U min = 1,5 V en U max = 2,5 V
Hoog CAN-niveau ten opzichte van massa: U min = 2,5 V en U max = 3,5 V
Deze waarden zijn bij benadering en kunnen, afhankelijk van de busbelasting, tot 100 mV variëren.
Oscilloscoopinstellingen voor PT-CAN (of F-CAN) meting:
CH1: Probe 1, Rank 1 B / div; DC DC2-aansluiting: Probe 2, Grade 1 V / div; DC-verbindingstijd: 10 ms / div 
Afbeelding 2: PT-CAN-meting: CH1 Low CAN, CH2 High CAN
Order voor weerstandsmeting met bijpassende weerstand K-CAN, PT-CAN en F-CAN
Het proces van het controleren van de weerstandsmeting:
- CAN-bus moet spanningsloos zijn
- Er mogen geen andere meetapparatuur worden aangesloten (parallelle aansluiting van meetapparatuur)
- De meting vindt plaats tussen CAN low level en CAN high level draden.
- Werkelijke waarden kunnen verschillende ohm verschillen van opgegeven waarden.
K-CAN
Er kan geen afzonderlijke weerstandsmeting worden uitgevoerd op de K-CAN-bus, omdat de weerstand varieert afhankelijk van de schakellogica van de computer!
PT-CAN, F-CAN
Om reflectie van het signaal te voorkomen, worden twee CAN-busdeelnemers (met de maximale afstand in het PT-CAN-netwerk) belast met een weerstand van 120 Ohm. Beide belastingsweerstanden zijn parallel verbonden en vormen een equivalente weerstand van 60 ohm. Met de voedingsspanning uitgeschakeld, kan deze equivalente weerstand worden gemeten tussen de datalijnen. Bovendien kunnen individuele weerstanden individueel worden gemeten.
Meetinstructies met een weerstand van 60 ohm: Koppel een gemakkelijk toegankelijke computer los van de band. Meet de weerstand op de connector tussen de lage en hoge CAN-draden.
Let op!
Niet alle auto's hebben een afsluitweerstand op de CAN-bus.De aanwezigheid van de ingebouwde afsluitweerstand op het aangesloten voertuig kan worden gecontroleerd met behulp van het juiste bedradingsschema.
CAN-bus werkt niet
Als de K-CAN- of PT-CAN-gegevensbus niet werkt, is er mogelijk een kortsluiting of een verbroken hoge of lage CAN-draad. Of defecte ECU.
Om de oorzaak van de fout te lokaliseren, wordt aanbevolen om als volgt te werk te gaan:
- Koppel de CAN-busdeelnemers op hun beurt los totdat een blok wordt gevonden dat de oorzaak van de storing is (= ECU X).
- Controleer de kabels naar computer X op kortsluiting of open circuit.
- Controleer indien mogelijk de ECU X.
- Een dergelijke reeks acties leidt alleen tot succes als de kortsluiting een verifieerbare draad heeft van de computer naar de CAN-bus. Als de draad in de CAN-bus zelf een kortsluiting heeft, moet u de bedrading controleren.
Wij behouden ons het recht voor typografische fouten, semantische fouten en technische wijzigingen.